
Autonomous
Rover Project

Mission Purpose
This project was the final for my “Fundamentals of Robotics” Course.
The purpose of this project was to work together in a randomly assigned team to build a rover that could autonomously complete missions through the use of a remote-control offroader base along with an array of different provided sensors and a Raspberry Pi. The missions given included tasks like:
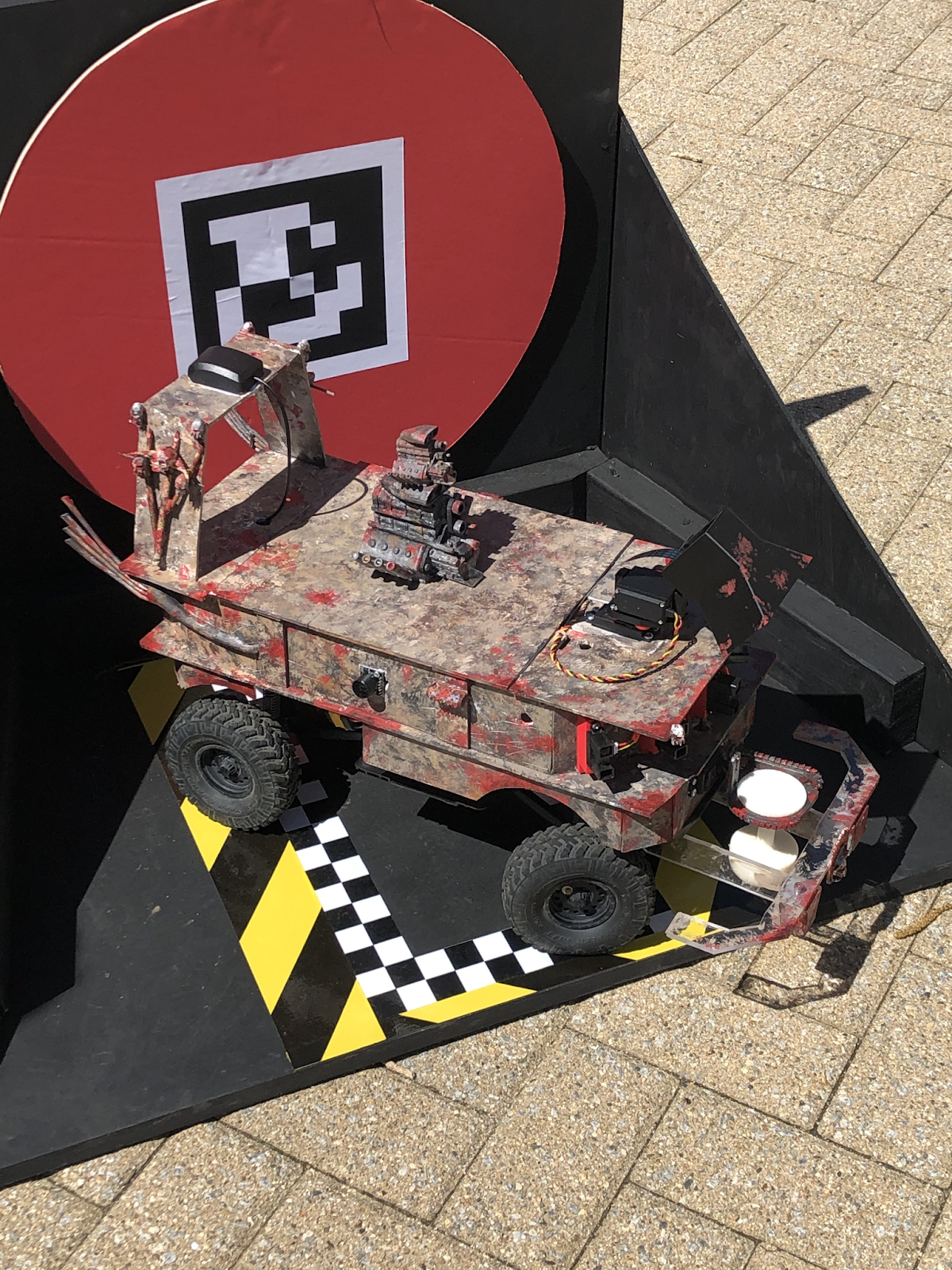
waypoint navigation
obstacle avoidance
docking and parking within target areas
depositing a payload into a dropbox
Rover Body
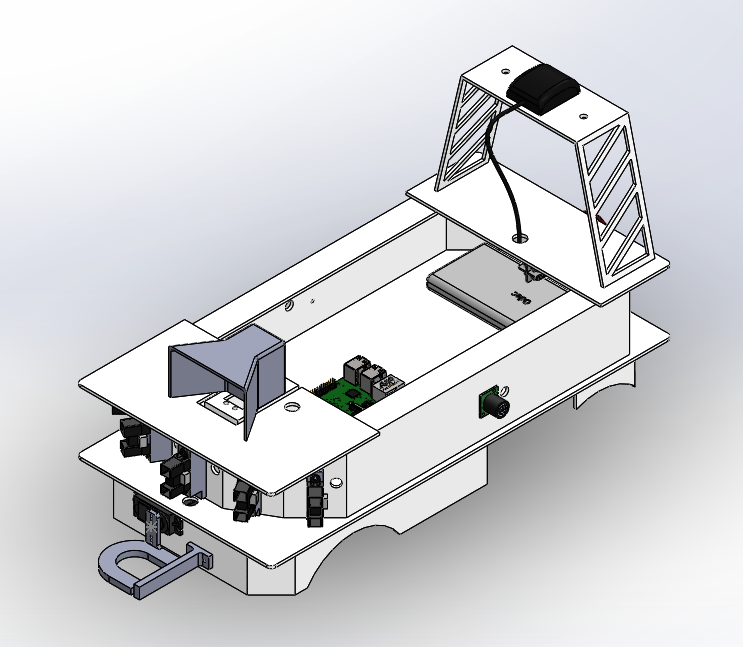
A body was constructed out of Sintra-board and 3D-printed parts to mount to the provided remote-control car chassis. Said body was designed to house and protect the 5 infrared sensors, 2 sonar sensors, deposit system, GPS unit, and Raspberry Pi along with their respective batteries and power supplies.
Electronics
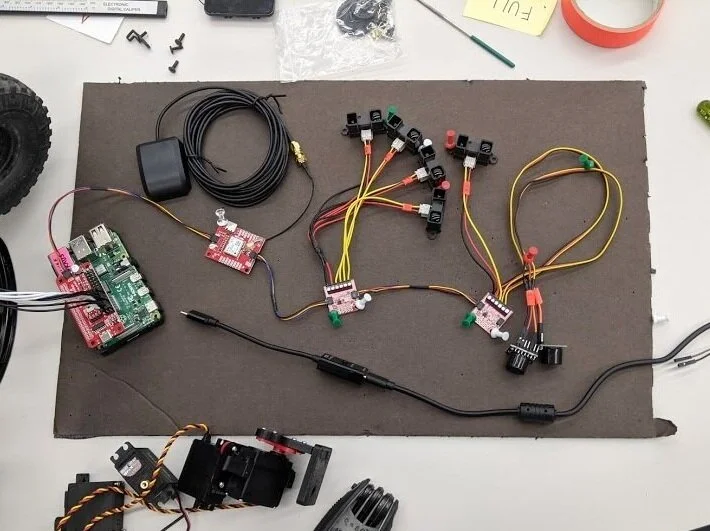
All electronic systems for the rover were managed through a Raspberry Pi 4, and all code for sensor data processing and mission control was written in Matlab and then compiled to run directly on the Raspberry Pi to avoid network-caused lag time.
What did I learn?
This project lasted just under 2 months, and during that time I stepped into the role of Project Leader - I kept meetings on track, checked in on team members and the status of each aspect of the rover, and filled in on whatever teams (CAD, electrical, programming) needed help at that moment. Although I ended up handling several subprojects in each area, I would say that leadership was what developed the most in me from this project - understanding how to keep a team motivated and on track as well as understanding what planning and bringing plans to fruition entailed was vital to the success of our rover.
As you can see at the top of the page, our team won the “Best Rover” award, which I believe was a product of our team cohesion.